人物移動予測
本研究分野では,動画像や人物軌跡データを用いて,人の移動や歩行行動を数理モデルとして表現し,将来の移動を高精度に予測することを目的とする.特に,不確実性やデータ不足,人物間の相互作用といった現実環境特有の課題に着目し,確率モデル,空間統計,物理ベースモデルと観測データを統合する手法を検討している.これらの研究は,人物追跡,群集解析,安全管理,都市空間解析などへの応用が期待される.
自己教師骨格表現学習による隠れに頑健な人物移動予測
Taishu Arashima, Hiroshi Kera, Kazuhiko Kawamoto, Robust Human Trajectory Prediction via Self-Supervised Skeleton Representation Learning, arXiv:2602.22791, 2026 [arXiv].
自律移動や監視などでは、「人が次にどこへ動くか」を予測する人軌跡予測が重要である。近年は、位置座標だけでなく人の骨格(関節)系列を併用し、動きの手掛かりを補強する研究が進んでいる。しかし実環境の骨格推定は、遮蔽などにより関節欠損が頻発し、これが予測性能を大きく劣化させる。すなわち、骨格を用いるほど情報は増える一方で、欠損に弱いというジレンマがある。本研究では、骨格系列を Masked Autoencoding による自己教師あり学習で事前学習し、欠損が存在しても安定して機能する骨格表現を獲得する。さらに、この表現を軌跡予測に組み込み、関節欠損に対する頑健性を高める。

確率的セルオートマトンを用いた人物移動予測
川本 一彦, 古閑 勇祐, 岡本 一志, 複数人物追跡のための確率的セルオートマトンの学習, 知能と情報, vol.28, no.6, pp.932-941, 2016.
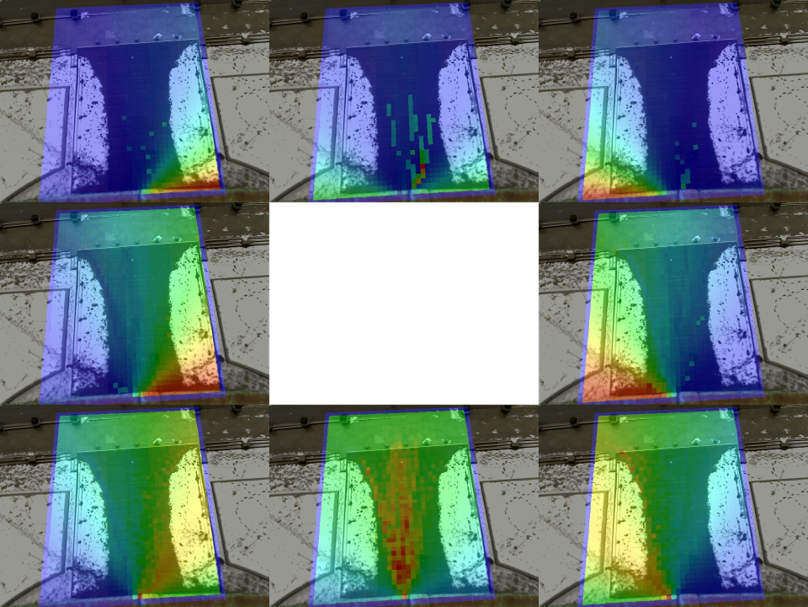
確率的セルオートマトンとは,空間を格子状に分割し,各位置から次にどの方向へ移動するかを確率として表すモデルである.本研究では,人物の移動履歴からこの確率を学習し,「この場所では次にどちらへ進みやすいか」を表現する.得られた移動モデルを用いることで,動画中で人物が一時的に見失われた場合でも,自然な移動を予測しながら追跡を行うことが可能となる.
クリギングを用いた人物移動予測
Kazuhiko Kawamoto, Yoshiyuki Tomura, Kazushi Okamoto, Kriging-based prediction and interpolation for modeling pedestrian dynamics, Proc. IFSA&SCIS , pp.1-4, 2017.
Kazuhiko Kawamoto, Yoshiyuki Tomura, Kazushi OKAMOTO, Learning pedestrian dynamics with kriging, In Proc. 15th IEEE/ACIS International Conference on Computer and Information Science, pp.39-42, 2016
クリギングとは,周囲の情報をもとに,観測されていない場所の値を推定する空間統計的手法である.本研究では,人物の移動を空間的に関連したデータとして捉え,周囲の人物の動きから将来の移動方向や位置を推定する.この手法により,部分的な観測データからでも歩行者の移動を予測できることを示している.
Social Force モデルを用いた人物移動予測
K. Kawamoto, Learning a Social Force Model for Pedestrian Motion Analysis from Image Sequences, In Proc. 4rd International Symposium on Computational Intelligence and Industrial Applications(ISCIIA2011), pp.3-10, 2010.
K. Kawamoto, A Data Assimilation Method for Estimating the Parameters of a Social Force Model for Pedestrian Motion Analysis, In Proc. 7th International Forum on Multimedia and Image Processing (IFMIP) in World Automation Congress (WAC), 2010.
Social Forceモデルとは,人が目的地に向かって進もうとする力や,他者や障害物を避けようとする力によって歩行が決まると考える行動モデルである.本研究では,このモデルを用いて歩行者の動きをシミュレーションし,実際の動画から得られる観測情報を使ってモデルを自動的に調整する.これにより,現実に近い歩行行動の推定と解析を実現している.