Pedestrian Motion Prediction
This research area aims to model and predict human movement and walking behavior using video data and pedestrian trajectory data. Human motion in real environments is inherently uncertain and strongly influenced by interactions with other people, as well as by limited or incomplete observations.
To address these challenges, we study methods that integrate probabilistic models, spatial statistics, and physics-based motion models with observed data. The outcomes of this research are expected to contribute to applications such as multi-person tracking, crowd analysis, safety management, and urban space analysis.
Occlusion-Robust Human Trajectory Prediction via Self-Supervised Skeleton Representation Learning
Taishu Arashima, Hiroshi Kera, Kazuhiko Kawamoto, Robust Human Trajectory Prediction via Self-Supervised Skeleton Representation Learning, arXiv:2602.22791, 2026 [arXiv].
In autonomous navigation and surveillance, human trajectory prediction—forecasting where a person will move next—is essential. Recently, research has progressed on augmenting motion cues by using not only positional coordinates but also human skeleton (joint) sequences. However, in real-world environments, skeleton estimation often suffers from frequent missing joints due to occlusions, which substantially degrades prediction performance. In other words, while incorporating skeleton information can provide richer signals, it also introduces a vulnerability to missing data. In this study, we pretrain skeleton sequences with self-supervised learning based on masked autoencoding to obtain skeleton representations that remain reliable even when joints are missing. We then integrate these representations into trajectory prediction to improve robustness against joint missingness.

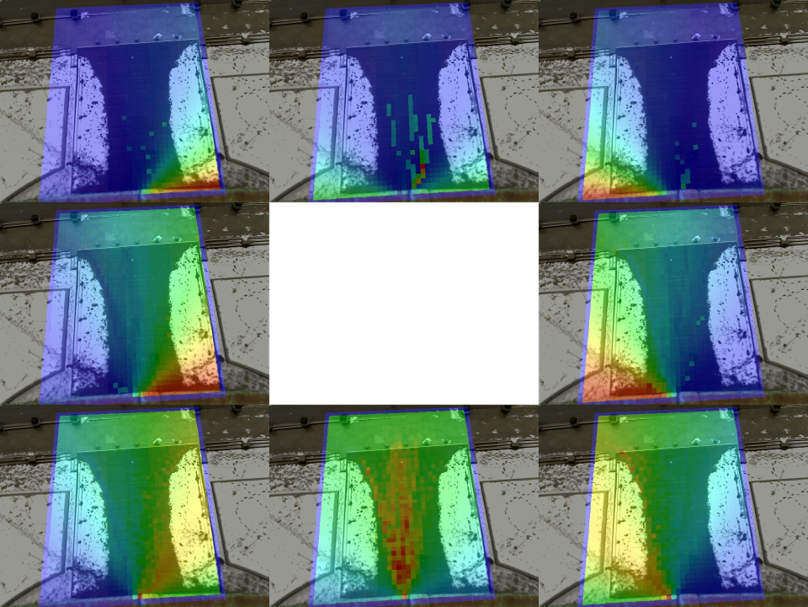
Pedestrian Motion Prediction Using Probabilistic Cellular Automata
Kazuhiko Kawamoto, Yusuke Koga, Kazushi Okamoto, “Learning a Probabilistic Cellular Automaton for Multiple Human Tracking,” Journal of Japan Society for Fuzzy Theory and Intelligent Informatics (Intelligence and Information), vol. 28, no. 6, pp. 932–941, 2016 (in Japanese).
A probabilistic cellular automaton represents space as a grid and models pedestrian movement as transition probabilities between neighboring grid cells. In this research, these transition probabilities are learned from observed pedestrian trajectories, capturing tendencies such as “which direction people are likely to move from a given location.” By using the learned motion model, pedestrian tracking can be maintained even when a person is temporarily occluded in a video, enabling more robust and natural motion prediction during tracking.
Pedestrian Motion Prediction Using Kriging
Kazuhiko Kawamoto, Yoshiyuki Tomura, Kazushi Okamoto, Kriging-based prediction and interpolation for modeling pedestrian dynamics, Proc. IFSA&SCIS , pp.1-4, 2017.
Kazuhiko Kawamoto, Yoshiyuki Tomura, Kazushi OKAMOTO, Learning pedestrian dynamics with kriging, In Proc. 15th IEEE/ACIS International Conference on Computer and Information Science, pp.39-42, 2016
Kriging is a spatial statistical method that estimates unknown values by exploiting correlations with surrounding observations. In this research, pedestrian motion is treated as spatially correlated data, where the movement of nearby people provides information about future motion. Using kriging, pedestrian trajectories can be predicted and interpolated even in partially observed environments, demonstrating that reliable motion prediction is possible from limited observation data.
Pedestrian Motion Prediction Using the Social Force Model
K. Kawamoto, Learning a Social Force Model for Pedestrian Motion Analysis from Image Sequences, In Proc. 4rd International Symposium on Computational Intelligence and Industrial Applications(ISCIIA2011), pp.3-10, 2010.
K. Kawamoto, A Data Assimilation Method for Estimating the Parameters of a Social Force Model for Pedestrian Motion Analysis, In Proc. 7th International Forum on Multimedia and Image Processing (IFMIP) in World Automation Congress (WAC), 2010.
The Social Force model describes pedestrian motion as the result of virtual forces, such as attraction toward a destination and repulsion from other pedestrians or obstacles. In this research, pedestrian motion is simulated using the Social Force model, and model parameters are automatically adjusted using observations obtained from real video sequences. This approach enables realistic estimation and analysis of pedestrian behavior in real-world environments.