ビデオを用いた人物移動予測
確率的セルオートマトンを用いた人物移動予測
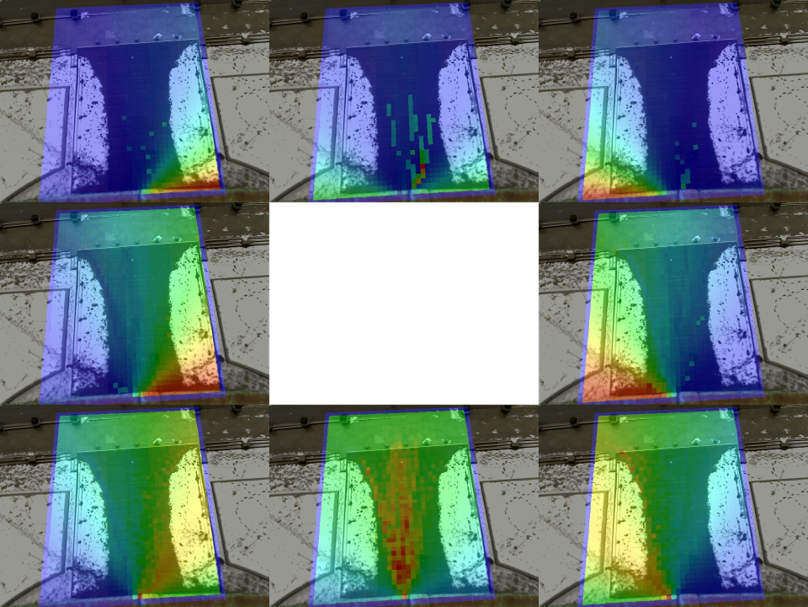
本研究では,人物軌跡データを用いて人物移動を模擬する確率的セルオートマトンを学習する方法を提案し,動画像上での複数人物追跡に応用する.確率的セルオートマトンの学習では,対象空間全体で十分かつ密に人物軌跡データを収集することは一般に困難であることから,ディリクレ平滑化を用いてベイズ的にデータの欠損や不足を補う方法を導入する.さらに,人物追跡のために,学習した確率的セルオートマトンによる人物移動シミュレーションを画像を用いて逐次的に更新するための逐次データ同化アルゴリズムを示す.実動画像を用いた追跡実験では,提案する確率的セルオートマトンを用いることにより,データに基づかない方法と比較して追跡性能が向上することを示す.
川本 一彦, 古閑 勇祐, 岡本 一志, 複数人物追跡のための確率的セルオートマトンの学習, 知能と情報, vol.28, no.6, pp.932-941, 2016.
クリギングを用いた人物移動予測
本論文では、地球科学における空間補間法であるクリギングを用いた歩行者動態の学習方法を提案します。歩行者動態は一般的に他の歩行者によって制限され、その制限は彼ら間の社会的相互作用によって引き起こされます。提案された方法では、社会的相互作用は歩行者動態の時空間的相関によって表現され、その相関はクリギングによって推定されます。提案された方法の応用として、歩行者の動きの予測が検討され、公開されているベンチマークデータセットを用いてその性能が評価されます。実験結果は、2.0[m]の距離誤差が許される場合、データセットの80%以上の軌道に対して10ステップ先の予測が成功していることを示しています。
Kazuhiko Kawamoto, Yoshiyuki Tomura, Kazushi Okamoto, Kriging-based prediction and interpolation for modeling pedestrian dynamics, Proc. IFSA&SCIS , pp.1-4, 2017.
Kazuhiko Kawamoto, Yoshiyuki Tomura, Kazushi OKAMOTO, Learning pedestrian dynamics with kriging, In Proc. 15th IEEE/ACIS International Conference on Computer and Information Science, pp.39-42, 2016
Kazuhiko Kawamoto, Yoshiyuki Tomura, Kazushi Okamoto, Pedestrian-movement prediction by kriging, In Proc. 4th IWACIII, pp.94-97, 2015.
Social Force モデルを用いた人物移動予測
我々は、画像シーケンスを使用して歩行者の動きの数値シミュレーションモデルのパラメータを再帰的に推定する方法を提案します。我々は、歩行者の動きのコンピュータシミュレーション分析において成功裏に使用されてきたいわゆる社会的力を用いてモデルを構築します。本論文の貢献は、数値シミュレーションモデルと画像シーケンスからキャプチャされた観測を組み合わせることにあります。このために、我々はデータ同化の枠組みを導入します。これはもともと気象予報や水文学などの地球科学において、実世界で利用可能な観測を用いて数値シミュレーションモデルを洗練するために開発されました。さらに、再帰的ベイズ推定のためにパーティクルフィルタを使用します。実際のビデオを用いた実験では、歩行者の動きの分析の事例研究を示します。
K. Kawamoto, Learning a Social Force Model for Pedestrian Motion Analysis from Image Sequences, In Proc. 4rd International Symposium on Computational Intelligence and Industrial Applications(ISCIIA2011), pp.3-10, 2010.
K. Kawamoto, A Data Assimilation Method for Estimating the Parameters of a Social Force Model for Pedestrian Motion Analysis, In Proc. 7th International Forum on Multimedia and Image Processing (IFMIP) in World Automation Congress (WAC), CD-ROM proceeding, 2010.